Liliaokeawawa (Lily) Cothren
👋 Hi, there! I’m Lily Cothren, a Ph.D. student in the Department of Electrical, Computer, and Energy Engineering at the University of Colorado, Boulder under the supervision of Professor Liz Bradley. I’m excited to continue my research as a Fellow for the National Science Foundation Graduate Research Fellowship Program (NSF GRFP) that started in the fall of 2023.
Check out my resumé and publications below!
Data-enabled Gradient Flow as Feedback Controller - Regulation of Linear Dynamical Systems to Minimizers of Unknown Functions
This paper considers the problem of regulating a linear dynamical system subject to external disturbances to the solution of a convex optimization problem with an unknown or partially-known cost. Our results demonstrate exponential input-to-state stability of the closed-loop system with our gradient-flow based controller.
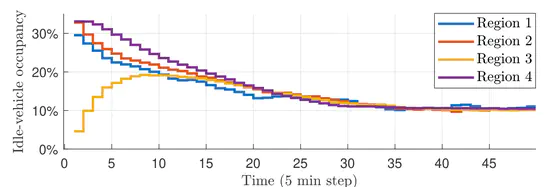
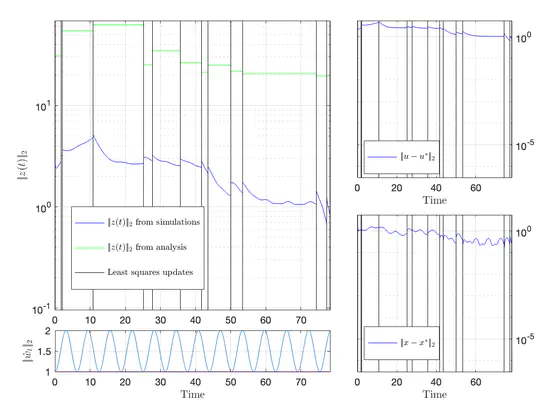
Online Optimization of Linear Time Invariant Dynamical Systems with Cost Perception
This paper considers the problem of regulating a discrete-time linear time-invariant (LTI) system to solution trajectories of a convex optimization problem, with an unknown cost. We propose a data-driven, gradient-based feedback controller that uses estimates of the cost functions obtained by a trained neural network to control the LTI system. We identify sufficient conditions to guarantee exponential input-to-state stability (ISS) of the closed loop system with respect to errors due to disturbances, temporal variability of the cost functions, and the need to use estimated costs from a neural network. Finally, we provide an illustrative numerical example in the context of online ride-share scheduling.
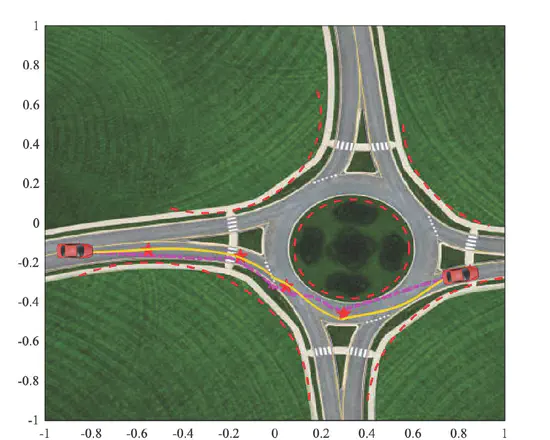
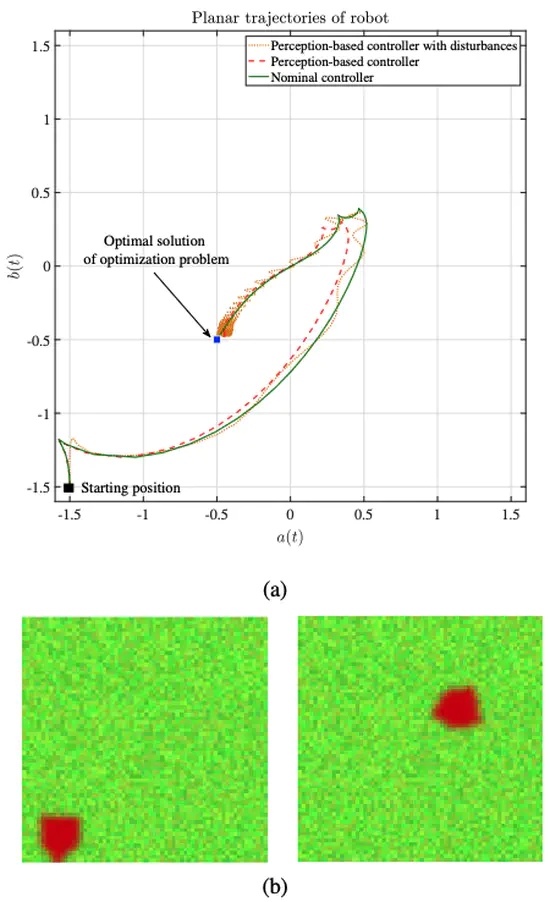
Perception-based Sampled-data Optimization of Dynamical Systems
Motivated by perception-based control problems in autonomous systems, this paper addresses the problem of developing feedback controllers to regulate the inputs and the states of a dynamical system to optimal solutions of an optimization problem when one has no access to exact measurements of the system states. In particular, we consider the case where the states need to be estimated from high-dimensional sensory data received only at discrete time intervals. We develop a sampled-data feedback controller that is based on adaptations of a projected gradient descent method, and that includes neural networks as integral components to estimate the state of the system from perceptual information. We derive sufficient conditions to guarantee (local) input-to-state stability of the control loop. Moreover, we show that the interconnected system tracks the solution trajectory of the underlying optimization problem up to an error that depends on the approximation errors of the neural network and on the time-variability of the optimization problem; the latter originates from time-varying safety and performance objectives, input constraints, and unknown disturbances. As a representative application, we illustrate our results with numerical simulations for vision-based autonomous driving.
Online Optimization of Dynamical Systems with Deep Learning Perception
This paper considers the problem of regulating a nonlinear dynamical system whose state cannot be directly measured. Leveraging neural networks to approximate system states, we demonstrate input to state stability of the closed-loop of the dynamical system and our data-driven controller.